Dopo la parentesi sulla tessellation e la presentazione, all’interno di questa rubrica, di un nuovo blogger, Matteo Fossati, la cui presenza sarà senza dubbio gradita a tutti gli appassionati e gli amanti della fotografia (non solo digitale), riprendiamo, questa settimana, il discorso sui sensori digitali e le loro architetture, con la relativa analisi del rumore. Questo tipo di analisi, volta ad esplorare le architetture dei sensori digitali e le relative componenti di rumore dal punto di vista circuitale, sarà condotta in parallelo con quella che Matteo sta portando avanti sulle dimensioni dei sensori digitali e sul confronto tra fotografia digitale ed analogica. L’idea è quella di partire da punti di vista differenti per poi convergere, al momento di tirare le somme sul discorso rumore e risoluzione al variare delle dimensioni e della densità dei sensori stessi. Inoltre, spero che la cosa risulti gradita, sarà proposto un confronto tra i risultati ottenuti con le pellicola e quelli ottenuti con il digitale, utilizzando come strumenti due fotocamere di fascia “pro” come la EOS 1Ds Mark III e la EOS 1V.
Fatta questa lunga premessa, riprendiamo dal punto in cui ci eravamo interrotti nella scorsa puntata. Dopo aver visto il funzionamento di una giunzione p-n, aver fatto la conoscenza di alcuni dei parametri di base dei sensori e aver iniziato ad introdurre le architettura CCD e CMOS, proseguiamo l’analisi delle componenti del rumore presenti nell’acquisizione e nell’elaborazione di un’immagine digitale. Finora, pur avendo introdotto due delle architetture tipiche utilizzate per la realizzazione degli strumenti di cattura della luce, abbiamo fatto considerazioni sul rumore di tipo molto generico e applicabili a qualunque tipo di sensore. Continueremo a percorrere questa strada fino ad aver analizzato le varie componenti del rumore, per poi passare ad un’esame sull’incidenza di ogni singola componente su ciascuna delle tipologie di sensori, non tralasciando gli X3, i SuperCCD e i LiveMos, i primi prodotti da Foveon con tecnologia CMOS, i secondi da Fuji e basati su matrice di tipo CCD e gli ultimi da Panasonic per il formato 4:3, con tecnologia N-MOS.
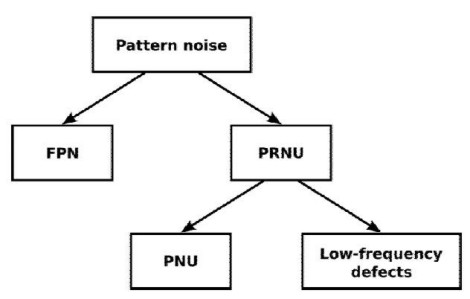
Se nel precedente capitolo avevamo iniziato ad introdurre il discorso sul rumore digitale e sulle due principali tecnologie di sensori, questa settimana focalizzeremo l’attenzione sul solo rumore digitale e sulle sue componenti. Come abbiamo visto, il rumore può essere suddiviso in due grandi categorie, in base alla tipologia del pattern. L’importanza di questo tipo di classificazione, come già detto, deriva dalla possibilità di filtrare il fixed pattern noise in maniera piuttosto efficace. Per comodità dei lettori, riporto una schematizzazione dei diversi tipi di rumore
dove con FPN si indica il fixed pattern noise, con PRNU il photo response non uniformity noise e con PNU il pixel non uniformity noise. come vedremo, sia il rumore di tipo fixed che quello di tipo random pattern, hanno componenti che si manifestano in assenza ed in presenza di eccitazione. Inoltre, è differente il trattamento del rumore a seconda che lo stesso si manifesti in assenza di “luce” o quando il sensore è colpito dalla radiazione luminosa. La componente di buio del FPN può essere eliminata del tutto con algoritmi che “leggono l’intensità del segnale” proveniente dal sensore in assenza di eccitazione, classificabile per intero come rumore di tipo fixed pattern, quindi leggono l’intensità del segnale proveniente dal sensore in presenza di eccitazione e fanno la differenza tra le due. Una variante introdotta da Canon è possibile solo con sensori con tecnologia MOS prevede che questo tipo di lettura e la conseguente sottrazione siano fatte per ogni singolo pixel, dando la possibilità, in tal modo, di effettuare una mappatura completa della componente di buio del FPN. Il metodo illustrato è schematizzato in basso

in cui non è riportata la prima fase, ossia quella della lettura preventiva del rumore in assenza di radiazione luminosa. Per quanto riguarda la componente di buio del PNU, invece, data la non ripetitività del pattern, le difficoltà che si incontrano sono maggiori. Però, ripetendo un procedimento simile a quello appena visto, ma facendo uso di una media dei rilevamenti del segnale di buio proveniente dal sensore in più istanti, si può arrivare a filtrare efficacemente anche questo tipo di rumore che, al contrario di quello fixed pattern, non è possibile, però, rimuovere del tutto. Fanno parte di questa tipologia tutti i rumori originati da un comportamento non uniforme dei fotorecettori ma anche la dark current nella regione di svuotamento in assenza di eccitazione nonchè quelli tipici di un circuito elettronico in idle. Appare chiaro che, paradossalmente, proprio la presenza di quegli elementi circuitali che rendono la tecnologia MOS più duttile, sono anche quelli che, epr buona parte, contribuiscono a questo tipo di rumore; infatti, tutti i circuiti di comparazione, amplificazione e conversione del segnale, presenti su ciascun pixel o, comunque, sul sensore, sono fonte di rumore elettronico aggiuntivo, così come la matrice di fotodiodi (o di photogate) è fonte di una minor uniformità di comportamento rispetto alla matrice di tipo CCD. Il lato positivo è che questi stessi circuiti sono anche quelli che permettono di elaborare il segnale e, di conseguenza, eliminare questo tipo di rumore, quello negativo è che la soppressione del fixed pattern noise comporta l’adozione di ulteriori stadi circuitali che riducono la sezione fotosensibile di ciascun pixel. Da sottolineare anche la dipendenza del rumore in “assenza di luce”, dalla temperatura: in particolare, il dark current noise raddoppia per ogni aumento di 8-9°C.
Il rumore rilevato in assenza di radiazione, non è, però, quello a cui si fa comunemente riferimento quando si parla di rumore digitale messo in relazione con gli ISO. Infatti, il rumore “di buio” è preponderante a bassi ISO e per lunghi tempi d’esposizione (questo rende la tecnologia MOS più indicata, ad esempio, per applicazioni di tipo astronomico, perchè permette di applicare filtri più efficienti rispetto al CCD, potendo agire individualmente su ciascun pixel), mentre il rumore in presenza di eccitazione e, in particolare, il photon shot noise, è quello maggiormante visibile ad alti ISO e per tempi d’esposizione, diciamo, brevi. Esplicito meglio il concetto precedentemente espresso: abbiamo visto che il fixed pattern noise è facilmente filtrabile e che la sua componente principale dipende dalla temperatura. Lunghi tempi d’esposizione comportano sensibili aumenti di temperatura nei circuiti elettronici e questo fa aumentare notevolmente la dark current il cui rumore è, però, possibile filtrare efficacemente. Per questo, quando si scatta in condizioni di “poca luce”, è preferibile, quando possibile, ricorrere a tempi di esposizione più lunghi ma ad ISO inferiori; questo perchè un aumento degli ISO fa aumentare un’altra delle componenti del rumore, quella dovuta all’amplificazione, che è di tipo random pattern ed è più difficile da contenere. Questa componente si va ad incidere negativamente su un già non ottimale valore del SNR. Per dare un’idea dell’andamento non solo qualitativo del rapporto segnale/rumore, riferito al solo random pattern (o temporal) noise, al variare dell’intensità luminosa, propongo il seguente grafico

da cui si vede che sia il segnale che il rumore dovuto ai fotoni che colpiscono la superficie fotosensibile, hanno andamento lineare con diverso coefficiente angolare. Il grafico fa riferimento ad una determinata temperatura (al variare della quale cambiano i valori delle componenti di rumore in figura) ma qualitativamente l’unica cosa che cambia è il momento in cui il photon shot noise inizia ad essere preponderante rispetto al resto. Come si può vedere, la differente inclinazione dei segmenti che rappresentano photon noise e segnale, divergono all’aumentare del numero di fotoni che colpiscono il sensore; questo significa che a valori più bassi dell’intensità luminosa corrisponde una maggiore incidenza del rumore dovuto alle fluttuazioni del numero di fotoni che per ogni intervallo di tempo o, per meglio dire, per ogmi ciclo di clock, colpiscono il singolo fotosito.
Di seguito, sono riportati esempi dei due tipi di rumore e del banding, di cui ci si occuperà a parte

In base alla schematizzazione presentata, vediamo che nel gruppo dei disturbi con pattern non uniforme rientrano due tipologie di “rumore”, una, al pari del FPN, intrinseca del sensore ma che, al contrario del FPN, si manifesta solo in presenza di radiazione luminosa e l’altra che, al momento esula da questa trattazione perchè non riconducibile strettamente alla fisica e all’elettronica dei dispositivi di cattura delle immagini, che è stata riassunta come LOW FREQUENCY DEFECT; brevemente, questo tipo di rumore è riconducibile alla rifrazione della luce sulle lenti componenti l’obiettivo e sulle particelle di pulviscolo presenti nell’ambiente; l’effetto è quello di creare delle “zone d’ombra” a forma di “ciambella” nell’immagine finale. Proprio per questa caratteristica, questi disturbi sono noti anche come doughnut pattern noise e vignetting.
Tornando al rumore di tipo random pattern riconducibile alle caratteristiche del sensore, indicato nello schema come PNU, troviamo che in questa categoria rientrano il photon shot noise, il reset noise, l’amplifier noise, il read noise e uan componente del dark current noise, ossia quella relativa all’eccesso di cariche minoritarie generate all’interno della regione di svuotamento della giunzione p-n, dalla radiazione luminosa incidente. A sua volta, una parte di questo random pattern noise può essere suddiviso in chroma noise e luminance noise, ossia ad una componente riconducibile alle fluttuazioni di colore e ad una riconducibile alle fluttuazioni di intensità lumnosa. In realtà, nelle fotocamere di fascia alta, anche le tre componenti del chroma noise sono trattate in maniera differente, in quanto la percezione del disturbo è più forte in presenza di rumore a frequenze più basse. Altro aspetto di cui teremo conto nell’analizzare i modi in cui si può intervenire per ridurre il rumore, è che, mentre con la pellicola il rumore è più evidente nelle zone più chiare dell’immagine, con il digitale avviene che il rumore è più avvertibile nelle zone più scure, cosa ovvia se si pensa che queste ultime sono quelle che presentano il peggior rapporto segnale/rumore. Un paragrafo a parte merita il rumore di quantizzazione, componente ineliminabile del processo di digitalizzazione delle immagini.
Fatta questa sintesi basata su considerazioni prettamente qualitative, nel prossimo capitolo partiremo da questa equazione

che fornisce il totale del segnale “letto” dalla fotocamera, complrensivo di rumore, per analizzare più in dettaglio le singole componenti del rumore e i relativi sistemi di filtraggio







